




Version v4.205f dated Dec., 2023
These updates are intended to further improve the performance and user-friendliness of the EndoPilot² device:
see description for further information

Datenschutzbedingungen (bearbeiten im Modul "Kundenvorteile")

Lieferbedingungen (bearbeiten im Modul "Kundenvorteile")

The right of return does not apply to sterile products or sealed goods
Version v4.205f dated 18. Dec., 2023

Trolley - cart with 3 shelves with rounded corners, - two universal sockets

D-Pack heating-tip (ML) .09middle-large, blue


Titanium Bone Filter KF-T3 includes: clamp, 1x locking ring, 1x silicone O-ring, 1x without metalfoil-sieve


Bone-mill KM-3cylinder-Ø 20 mm Material: Steel+ polished cylinder+ vacuum solidified cuts+ vacuum solidified casing+ special "easy cut" cylinder incl. "Spezial Oil Spray"

Clamp, (red)for Titanium Bone Filter KF-T2non steril


EndoPilot² expansion for obturation:With this expansion, you get all the components you need for obturation.Holder:110 2302 D-Pack/Backfill holder left Obturation:DownPack:109 0151 D-Pack handpiece, with LED-indicator 109 0152 Heating-tip size:...

EndoPilot² ultra:consist of:Control Unit: 110 2010 EndoPilot² control unit with 7" touch-screen 110 2203 AC /DC adapter for EndoPilot² 109 2361 Wireless-footswitch, single, bluetooth 109 2311 Apex cable 110 2303 Retainer for apex cable...

cable for file-clamp for EndoPilot


Surgical aspiratorwith tube (2m),sterilized Mediplast / REF 68104


Obturationsmodul D-Pack™ für EndoPilot With the DownPack-module, an obturate, threedimensional filling of the apical third is achieved. With the help of the warm, vertical condensation technique, highly efficient, safe and homogeneous root canal...


Apex-measuring cable with plug for Endopilot but without file-clamp, Lip-clip or cable for file-clamp
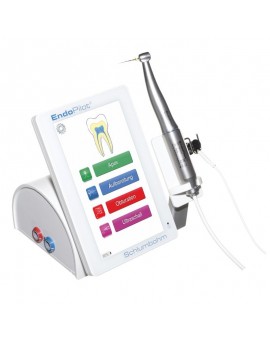
EndoPilot² comfort consist of:Control Unit: 110 2010 EndoPilot² , touch-screen, Display: 7" TFT 110 2203 AC /DC Adapter for EndoPilot² 109 2361 Wireless-Footswitch, single, bluetooth 109 2311 Apex-cable-set 110 2303 Retainer for apex-cable...

Gutta Percha Bar Pluscontent: (100pcs./box)


file-clamp, dismountablefor EndoPilot

EndoPilot² ultra plus:consist of:Control Unit: 110 2010 EndoPilot² control unit with 7" touch-screen 110 2203 AC /DC adapter for EndoPilot² 109 2361 Wireless-footswitch, single, bluetooth 109 2311 Apex cable 110 2303 Retainer for apex cable...
Version v4.205f dated Dec., 2023
These updates are intended to further improve the performance and user-friendliness of the EndoPilot² device:
see description for further information